Tech
Inventor James Bruton Builds Self-Balancing, One-Ball Bike


Inventor James Bruton has done it again, creating a machine that challenges our perceptions of balance and motion. His latest creation rolls on a single huge ball, maintains its upright position with an endless stream of computer corrections, and cruises in whatever direction the rider chooses.


People who enjoy engineering and experimenting with devices are familiar with Bruton’s never-ending search for unusual vehicles. A year ago, he showed us a version that used two large red balance balls, similar to those used by circus artists, along with wheels that could spin in any direction. This allowed the rider to move their weight in any direction. Now that he has reduced it to a single ball, he must deal with stability in two axes at the same time.
Sale


Segway Ninebot S2 Electric Self-Balancing Scooter – Master Your Commute w/t 11.2 mph Max. Speed, 21.7 Mi…
- Speed & Range: Experience exhilarating rides with the Ninebot S2’s impressive top speed of 11.2 mph and range of 21.7 miles.
- Beginner-Friendly: Perfect for riders aged 16-50, the Segway S2 features a user-friendly learning mode, providing a smooth and gradual introduction.
- Adjustable & Supportive: Enjoy a customized fit tailored to your needs, as the Segway S2 accommodates heights ranging from 4’3″ to 6’6″ and supports…
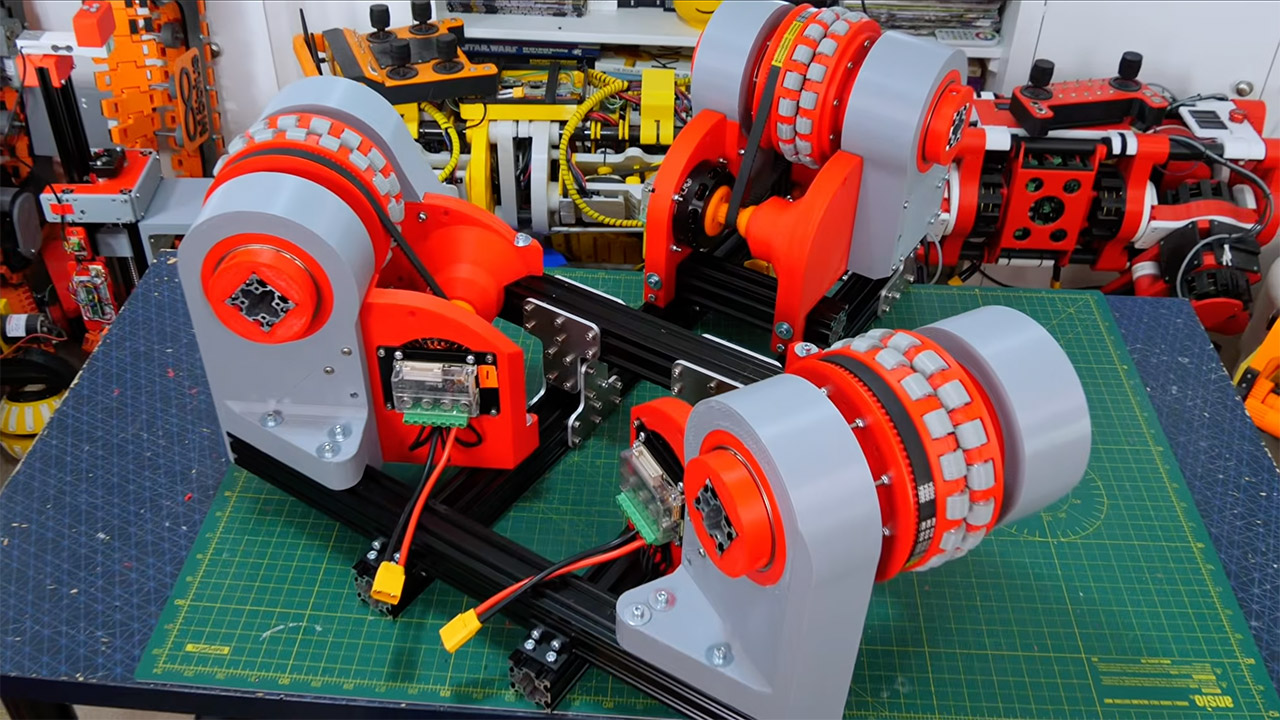
Three custom-made omni-wheels cradle the ball in a compact triangular frame. Each has an aluminum core encased in two rows of teeny-tiny rollers for a total of 216 bearings, which are covered with gripping 3D printed TPU tires. Commercial omni-wheels failed in earlier experiments due to overheating and excessive drag, so Bruton attempted to create his own for more strength and less friction. The wheels are crammed in vertically as a deliberate choice to prevent them from colliding at high speeds.

ODrive’s powerful motors, rated at 2kW each, spin the wheels directly via 1:1 belt drives. Six 6S lithium batteries provide 50 volts, with separate batteries for the electronics to ensure everything runs properly. A robust chassis composed of 40/40 aluminum extrusion is what holds everything together. It must to support the rider’s weight while also keeping the ball in the center.

To keep the machine upright, it utilizes a Teensy 4.1 microprocessor and a BNO086 IMU. That IMU tracks pitch and roll in real time, and a PID control loop uses those angles to modify the speed of the wheels, pushing back against any lean and keeping the rider steady as a rock. There are also twist grips on the handlebars that allow the rider to shift the balance point roughly 10 degrees and send it off in any direction they like.

Once you get started, the movement begins to seem natural. Lean slightly, and the system responds by sending the ball in that direction. The single-ball design ultimately allows the machine to move in all directions, as there is no requirement for differential speeds like in the two-ball version.

Steering is the major puzzle here, as with only one ball and straight up and down wheels, you lose all of the natural balance control that comes in handy when steering a bike, but leaning the bike helps a lot when you need to change direction while in motion; it’s the best way to do so. The difficulty arises while attempting to spin or do extremely tight turns. For the time being, Bruton has devised a temporary solution: a large foam wing attached directly behind the rider. As the bike accelerates, the wing begins to generate drag, which helps pull the bike into a turn as the rider leans, and curiously enough, it appears to perform well in tests. He describes it as a temporary solution, yet it works remarkably effectively.

There were also some teething issues with the electronics, particularly the ball. It was producing a lot of static electricity, causing the entire bike to misbehave at random. However, the problem was easily resolved with a short layer of nickel shielding spray on the electronics box. Now you’ve got a bike that is just begging for you to try and balance on it at high speed, and for which a lot of skill and experimentation are going to be rewarded. Bruton has also uploaded all of the code and CAD files on GitHub, allowing anyone to join in and try their hand at it.
[Source]