
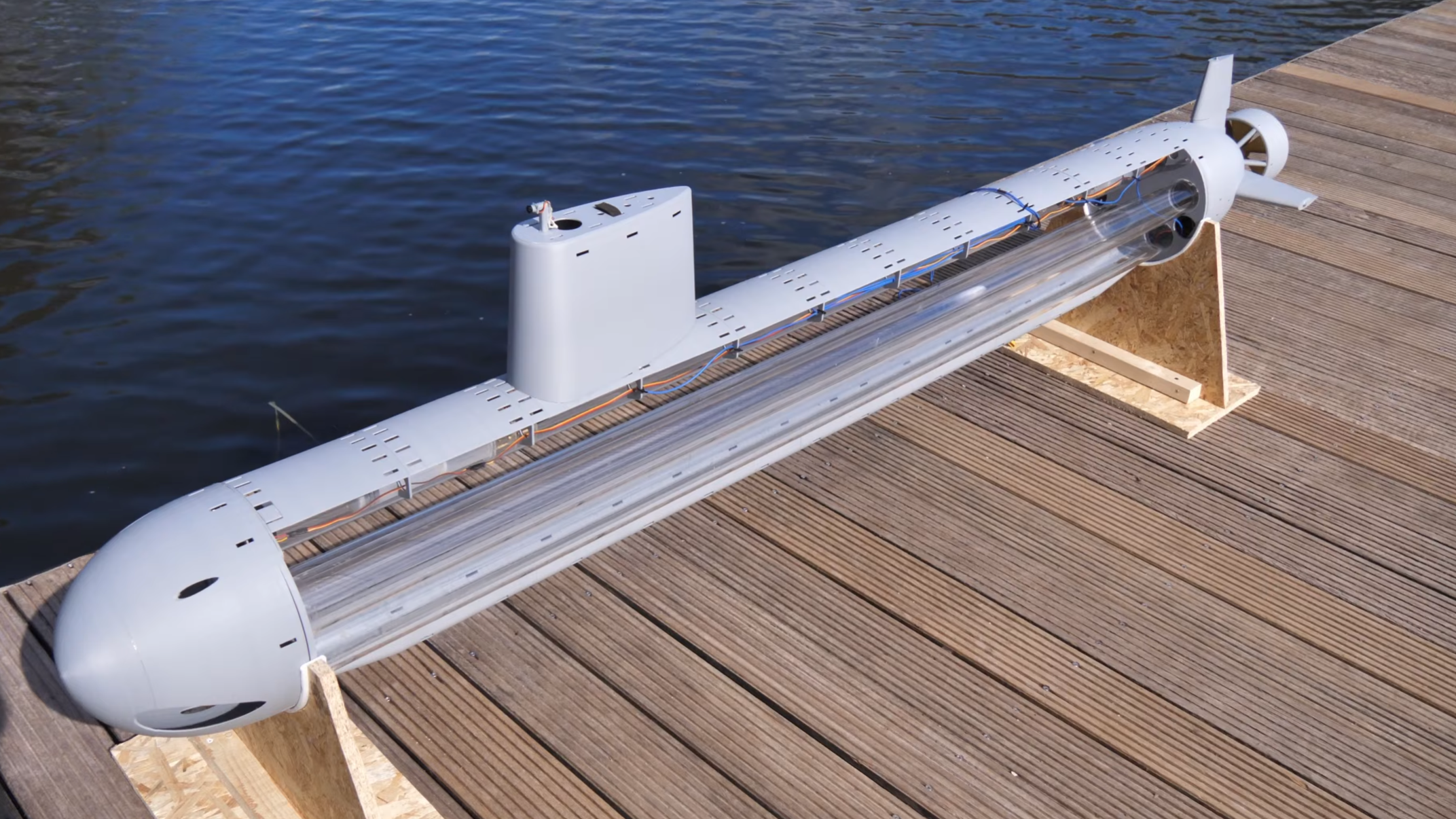
Of all the remote-control vehicles one can build, a submarine is possibly the hardest: if something goes wrong with almost any other vehicle, it’s easy to recover and repair, but a submarine is a very different affair. This nearly lost [James] of [ProjectAir] his latest project, a 2.7-meter long RC submarine, but it survived to make a few test sails.
Before building the full version, [James] made a test prototype. These submarines use large syringes as ballast tanks, pulling water in and out of the submarine body. The plungers are driven by a lead screw, and have a linear potentiometer for feedback. This can be wired in the same way as a servo motor, making it compatible with the RC controller. The controller receives its signal from an antenna in a buoy tethered to the submarine. Since initial tests worked well, [James] moved on to the full-scale model.
This was made out of radially-arranged acrylic tubes, with all but the top tube left open to the water. At the back of the submarine there were servo-actuated fins and a propeller, which would allow it to steer, ascend, and descend underwater. To waterproof the servo motors, [James] sealed them as much as possible, then filled them with oil. The other water-exposed electronics were either potted in epoxy or coated with a waterproofing compound. During testing, the submarine descended without issue, but was reluctant to resurface. Most of the external components had been 3D printed, and water infiltrated the infill below a certain depth. [James], however, managed to recover it before it was permanently lost, and managed to make a few other dives at a very limited depth.
On the other end of the spectrum from an RC submarine, we’ve also seen a rubber band-powered submarine. We’ve also seen a smaller, but more dive-ready RC submarine.
Thanks to [H Hack] for the tip!


































































You must be logged in to post a comment Login